Introduction:
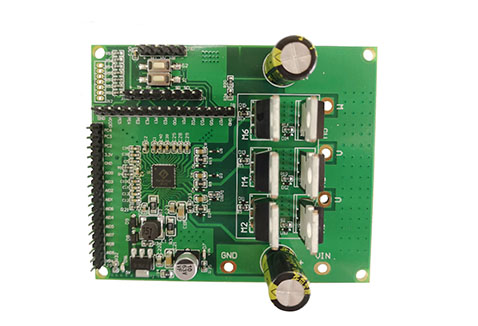
Active Semi M0 Cortex SoC: PAC5223 and AOS Mosfet: AOT 240L are used in this low-voltage three-phase brushless DC motor control board. The chip integrates digital core and analog core including Pre-Driver and DC/DC power management, so the system has simple structure, fewer devices, high reliability and high cost performance. At the same time, software packages and PC software are provided to facilitate the configuration of motor parameters, allowing developers to run the motor in one day and verify the system in seven days.
In order to expand conveniently, a series of pins are installed on the control board to measure each pin signal of the main chip, including 10 PWM output channels, 10 ADC input channels, I2C, UART, SPI communication ports and general GPIO. The control board provides two communication ports: SWD and UART. Developers can read and write the registers of the main chip PAC5223 by burner and SWD protocol, and debug the firmware simulation by IDE. UART is used as the communication port between the control board and PC. Developers can establish the communication between PC host computer and the control board by using the tool of USB to UART.
Guidelines for Use:
1. Connect the UVW terminal of the three-phase DC motor with the UVW terminal of the control board.
2. Connect the power supply and light the LED to indicate that the system is powered up normally.
3. Turn on the motor and turn off the motor through the upper computer GUI.
4. If the motor parameters need to be adjusted on the host computer, the output foot of the USB to UART adapter is connected to UART Port of the control board.
5. If debug/burn is needed, the SWD output foot of the burner is connected to SWD Debug of the control board.
1. Input: 5.2-70V, output current max: 50A, speed (single-pole) max: 120,000 RPM;
2. Driving waveform: positive/square wave is optional;
3. Hall-free or Hall-free motors are applicable.
4. Five-fold protection: over-voltage or under-voltage, over-current, over-temperature, over-load, over-speed;
5. ARM M0 platform, versatility, rich interface.
1. Input: 5.2-70V, output current max: 50A, speed (single-pole) max: 120,000 RPM;
2. Driving waveform: positive/square wave is optional;
3. Hall-free or Hall-free motors are applicable.
4. Five-fold protection: over-voltage or under-voltage, over-current, over-temperature, over-load, over-speed;
5. ARM M0 platform, versatility, rich interface.
 简体中文
简体中文

 QQ consulting
QQ consulting Online Message
Online Message